 |
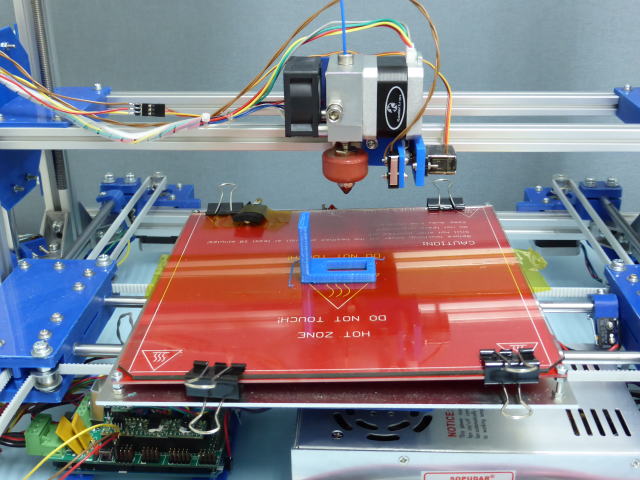
オートベッドレベリングとはベッドの高さが狂っていたりベッドが傾いていても自動的に補正して印刷する機能です。 左の写真は動作テストのためベッドを極端に傾斜させて印刷した結果です。 Z軸はもちろんX、Y軸も補正されます。 印刷したL型パーツの角度は直角です。 写真の通り、ベッドの傾斜に合わせてZ軸も傾斜して印刷されパーツの直角が確保されています。 |
 |
1 サーボモーターの取付(TG9zの場合) ここではサーボモーターがTG9zの場合を説明します。 HKSCM16-5の場合は「2 サーボモーターの取付(HKSCM16-5の場合)」へ進んでください。 サーボモーターはマイクロスイッチを上下させるのに使います。 |
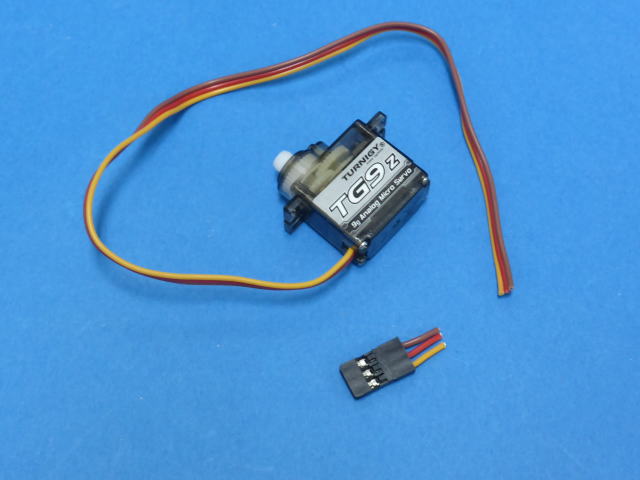 |
サーボモーターに付いているコネクタは使いません。 写真のように切ってください。 |
 |
茶赤黄の電線で延長してください。 電線の片方は3ピンソケットをハンダ付けしてください。 |
 |
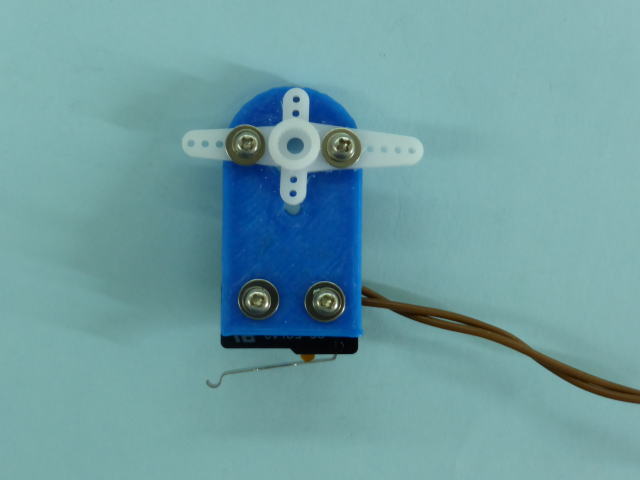
左はサーボモーター用の円板です。 赤丸で示す2箇所の穴の直径が2mmになるようドリルで広げてください。 |
 |
Z軸用マイクロスイッチブラケットにサーボモーターの円板を取り付けてください。 M2*8+W+SW+Nで固定 Z軸用マイクロスイッチブラケットにマイクロスイッチを取り付けてください。 M2*14+W+SW+Nで固定 TG9zの説明はここまでです。 |
 |
2 サーボモーターの取付(HKSCM16-5の場合) サーボモーターに付いているコネクタは使いません。 写真のように切ってください。 |
 |
茶赤黄の電線で延長してください。 電線の片方は3ピンソケットをハンダ付けしてください。 線の色の順番は写真に合わせてください。 |
 |
左はサーボモーター用のアームです。 赤丸で示す2箇所の穴の直径が2mmになるようドリルで広げてください。 |
 |
Z軸用マイクロスイッチブラケットにサーボモーターのアームを取り付けてください。 M2*8+W+SW+Nで固定 Z軸用マイクロスイッチブラケットにマイクロスイッチを取り付けてください。 M2*14+W+SW+Nで固定 |
 |
サーボモーターのアームがZ軸用マイクロスイッチブラケットより飛び出している部分は不要なのでニッパーで切落としてください。 HKSCM16-5の説明はここまでです。 |
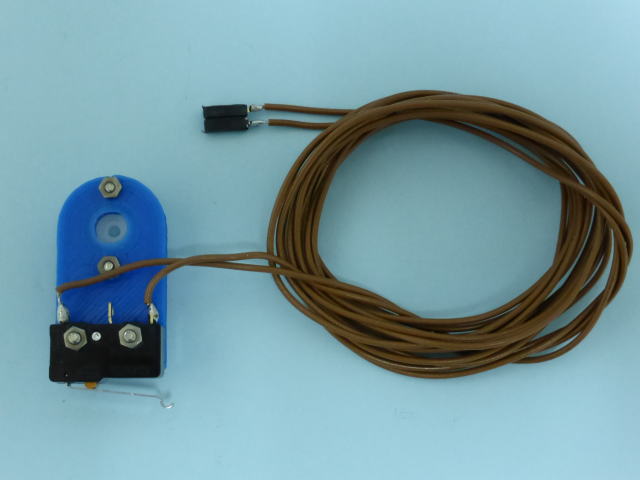 |
電線のもう片方は2ピンソケットをハンダ付けしてください。 |
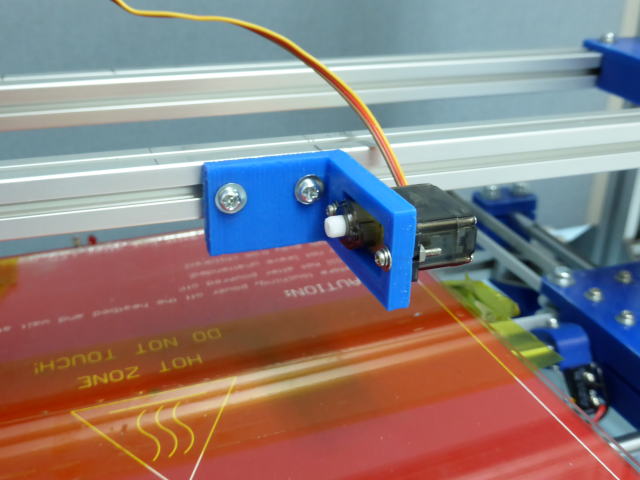 |
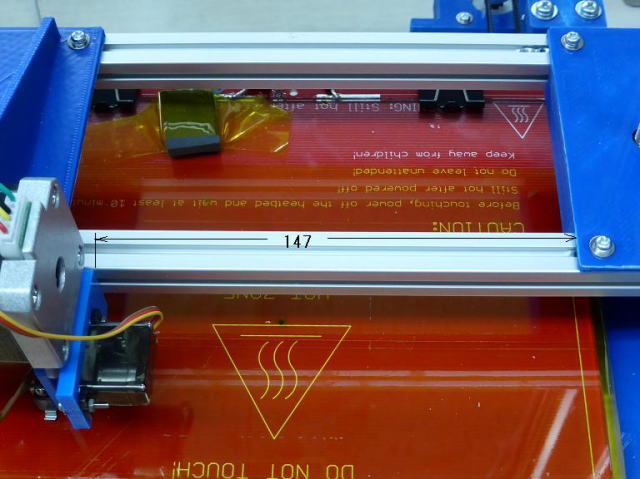
プリントヘッドブラケットの固定ネジを緩めてプリントヘッドを一時左端に移動させてください。 サーボモーターをこのように固定します。 |
 |
サーボモーターはこの位置に固定してください。 |
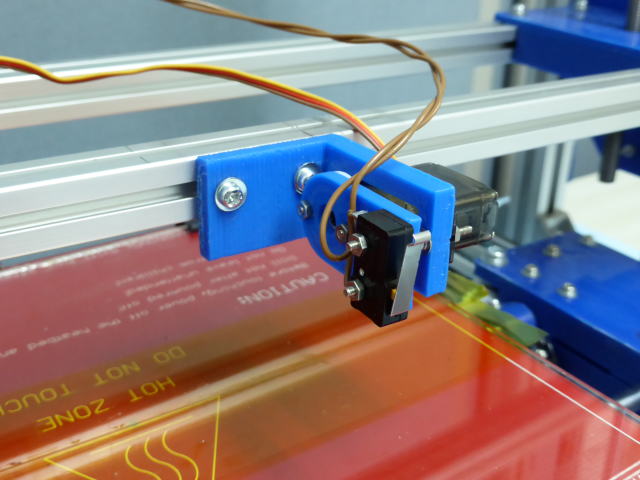 |
サーボモーターの軸にマイクロスイッチブラケットを固定します。 |
 |
右斜めからみた様子 |
 |
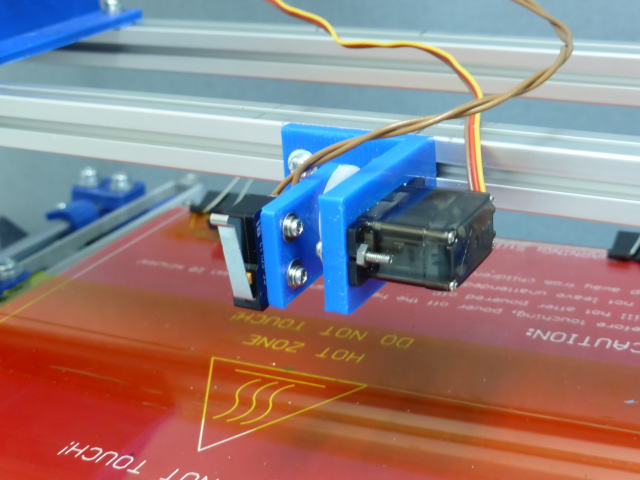
プリントヘッドを基の位置に戻します。 |
 |
右斜めから見た様子 |
 |
サーボモーターの線はこの位置に差し込みます。 線の色を間違えないでください。 間違えると一瞬で壊れる可能性があります。 その左にスイッチが見えます。 更にその左にジャンパーコネクター(赤色)を差し込んでください。 マイクロスイッチの線はZ軸のエンドストップ用の端子へ差し込んでください。 組立は以上です。 続いてファームウエアーの書換えに進みます。 下記をクリックしてください。 ファームウエアーの書換えページへ行く |