 |
MAX位置の動作確認 全Homeボタン(左下の家だけのボタン)をクリックしてください。 X、Y、Zすべてのキャリッジが上方向に動いてマイクロスイッチが動作すると停止します。 エフェクターが最上部に移動した訳です。 |
| 全軸Home(動画) | |
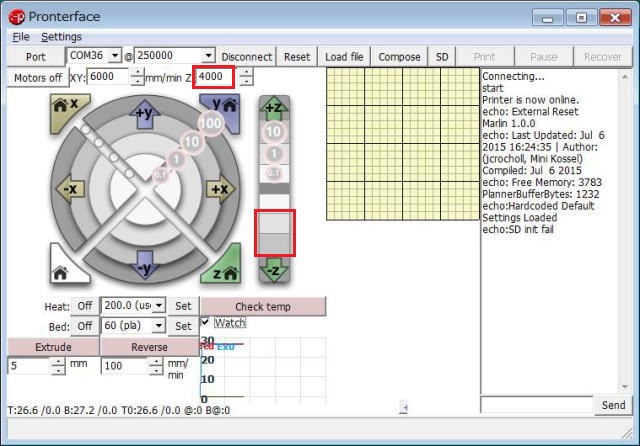 |
マイクロスイッチの位置調整 Z軸の速度[mm/min]を4000に設定してください。 (脱調が発生する場合は2000に設定してください。) Z軸の「-10」または「-1」のボタンをクリックするとエフェクタが下方向に動きます。 ノズル先端がベッドの2mm上の位置になるまで下げてください。 |
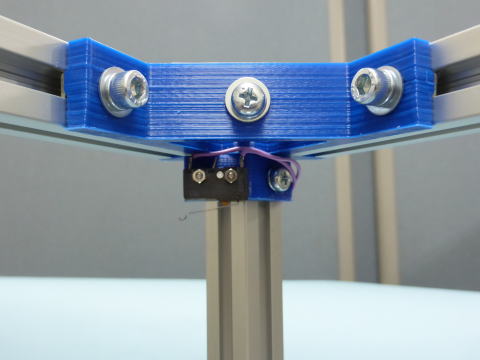 |
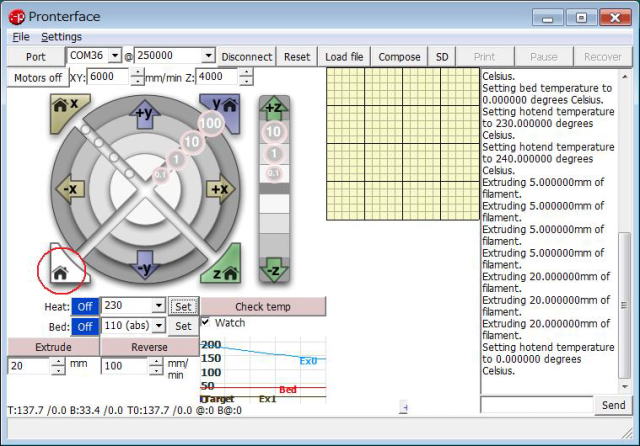
下記の3箇所においてベッドとノズルの隙間が等しくなるよう3個のそれぞれのマイクロスイッチの位置を調整してください。 1.X=-69.28,Y=-40 2.X=69.28,Y=-40, 3.X=0,Y= 80 右下の枠に下記のコマンドを入力して「Send」をクリックするとノズルがその位置に移動します。 1の位置に移動するコマンド・・・G0 X-69.28 Y-40 2の位置に移動するコマンド・・・G0 X69.28 Y-40 3の位置に移動するコマンド・・・G0 X0 Y80 一度では調整できないので3〜4回繰り返してください。 |
 |
ベッドとノズルの隙間を計測するには左のようなテーパーゲージが便利です。 新潟精機 TPG-270AA (値段は約3500円) |
| #define DELTA_SMOOTH_ROD_OFFSET 183.6 //mm | ノズルをセンターに移動してください。 コマンド・・・G0 X=0 Y=0 この位置でベッドとノズルの隙間を測定してください。 上の3箇所の隙間と等しくなるよう調整する必要があります。 ここからはファームウエアの一部修正作業となります。 「Pronterface」の「Disconnect」をクリックしてPronterfaceと3Dプリンターを切り離してください。 これからファームウエア書き換えを実施します。 ファームウエア書き換え手順は「動作テスト・調整マニュアル」のトップページに戻って「ファームウエア書き込み」をご参照願います。 Arduino開発環境で「Configurationh」を選択してください。 DELTA_SMOOTH_ROD_OFFSETの値を調整します。 ノズルの位置を下げるには
DELTA_SMOOTH_ROD_OFFSET を増やす。
ノズルの位置を上げるには
DELTA_SMOOTH_ROD_OFFSET を減らす。
値を変更したらファームウエアを書き変えてください。 センター位置のベッドとノズルの隙間が柱の近くの3箇所と等しくなるようDELTA_SMOOTH_ROD_OFFSETの値の調整を繰り返してください。。 |
前のページへ戻る
次へ行く
動作テスト・調整マニュアルのトップページへ戻る