 |
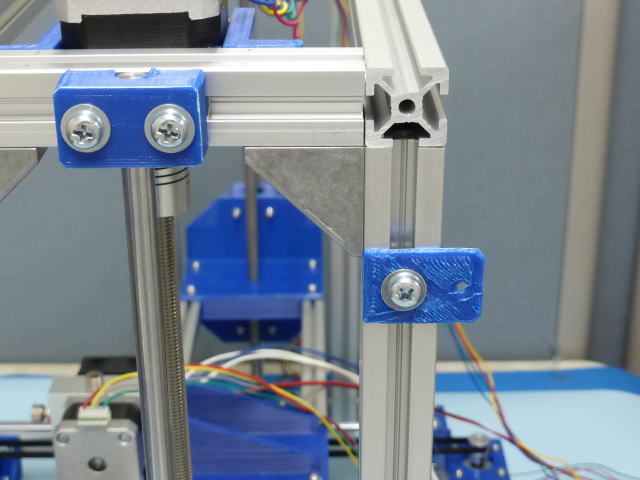
22 Z軸用モーター配線固定 ケーブルブラケットを固定する角ナットを入れます。 Z軸の横アルミフレーム(写真では右上の510mmのアルミフレーム)を固定しているコーナージョイントのネジを緩めてください。(両側共) 横アルミフレームを横方向に10mm程スライドしてZ軸の柱フレームの溝に角ナットを4個づつ入れてください。 角ナットを入れた後横アルミフレームを元の位置に戻して固定してください。 ケーブルブラケットを固定してください。(左右4箇所づつ) M5*8+Wで固定(8箇所) |
 |
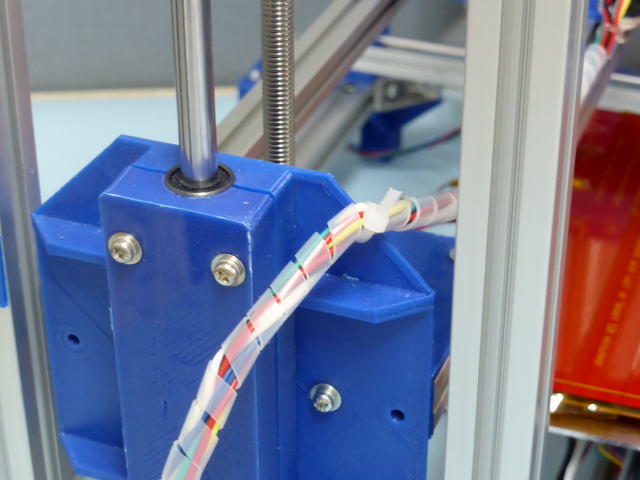
Z軸のモーターの線にスパイラルチューブを被せてこのようにケーブルブラケットに固定してください。 |
 |
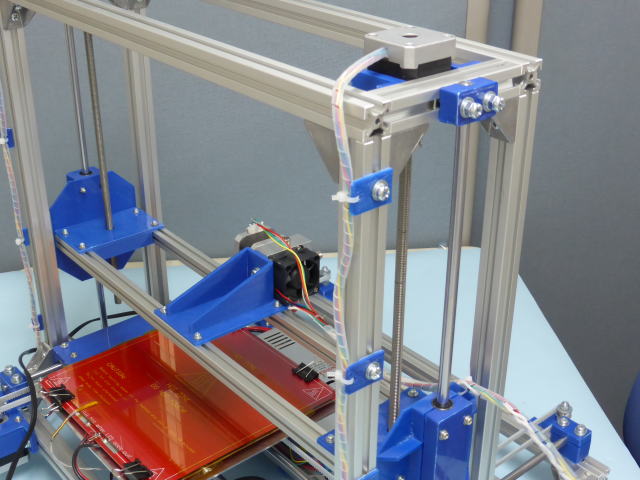
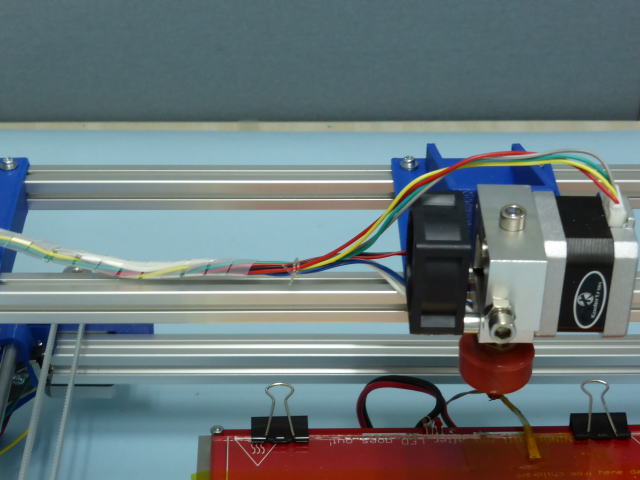
23 プリントヘッド用配線の処理 プリントヘッドの線にスパイラルチューブを被せてください。 |
 |
|
 |
束線バンドを使ってプリントヘッドの線をZキャリーの右上の穴に固定してください。 Zキャリーが上下しますのでこの部分から下は固定しないでください。 |
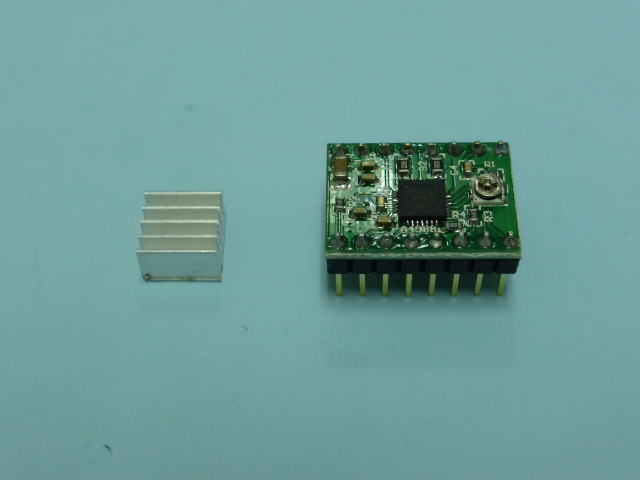 |
24 ドライバ基板の取付 ドライバ基板とヒートシンクです。 |
 |
ヒートシンクに両面テープが貼ってありますのでシートをはがしてICに接着してください。 4個すべてこのようにしてください。 |
 |
コントロールボードRAMPS基板にドライバ基板を差し込んでください。 向きを間違えないよう注意してください。 向きを間違えると正常に動作しないのはもちろんドライバが破損する恐れがあります。 |
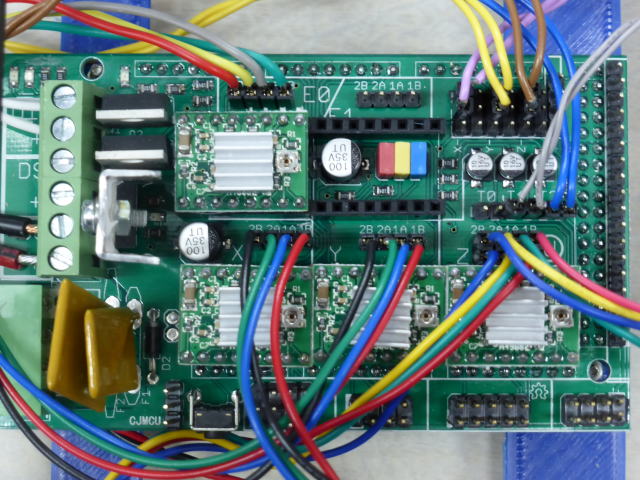 |
25 各機器からRAMPSへの配線 モーターやマイクロスイッチの線をコントロールボードRAMPSへ接続します。 |
 |
X、Y、Zはステッピングモーターの接続端子です。 X 本体を前から見て右のモーターの線を赤の線が右側に来るように差し込んでください。 Y 本体を前から見て左のステッピングモーターの線を赤の線が右側に来るように差し込んでください。 Z Z軸モーターの線を赤の線が右側にに来るように差し込んでください。(2台分をパラレルで接続) |
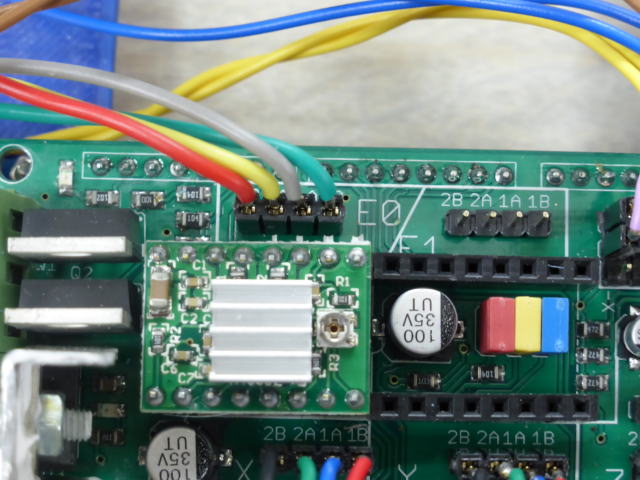 |
E0はエクストルーダー用ステッピングモーターの接続端子です。 E0 プリントヘッドからのモーターの線を赤の線が左側に来るように差し込んでください。 |
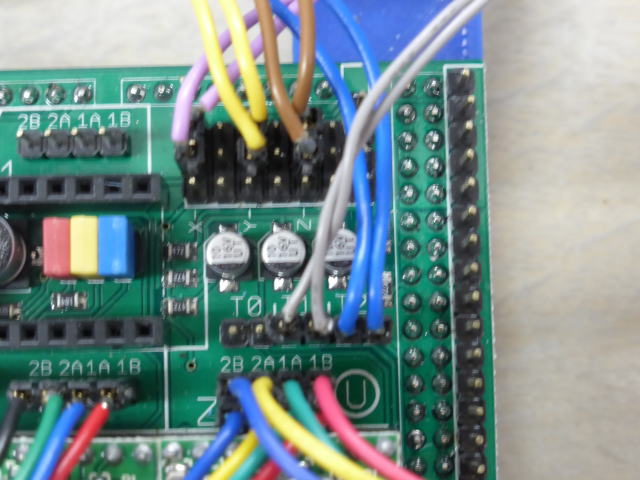 |
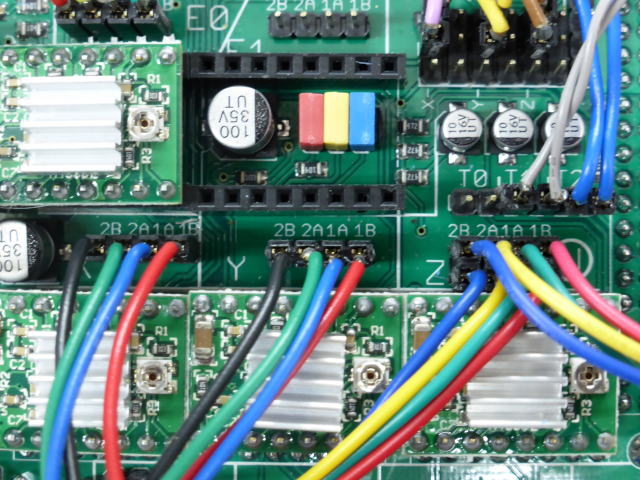
右上にある横6ピン×縦3ピンの接続端子はマイクロスイッチの接続端子です。 左からX軸END、X軸MAX、Y軸END、Y軸MAX、Z軸END、Z軸MAX用です。 使うのはEND用だけでMAX用は使いません。 縦方向に3ピンありますが上の2ピンに差し込んでください。 3ピン目は使いません。 X軸END・・・X軸用マイクロスイッチ(紫色) Y軸END・・・Y軸用マイクロスイッチ(黄色) Z軸END・・・Z軸用マイクロスイッチ(茶色) その下は温度計測用のサーミスターの接続端子です。 T1・・・ヒートベッドサーミスター(灰色) T2・・・ホットエンドサーミスター(青色) |
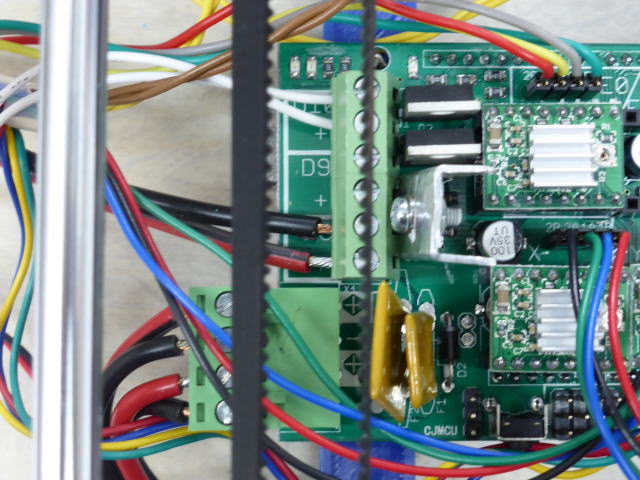 |
D10、D8はヒーター用接続端子です。 D10・・・ホットエンドヒーター(白の線) D8・・・ヒートベッドヒーター(赤黒のペア線) 左下の4極のコネクタは電源用コネクタです。 +側に赤の電源線を、-側に黒の電源線を接続してください。 色を間違えないよう接続してください。 電源線は大きな電流が流れます。 ネジは強く締め付けてください。 締め付けが不十分ですと過熱してコネクタが焦げたり煙りが出る恐れがあります。 |
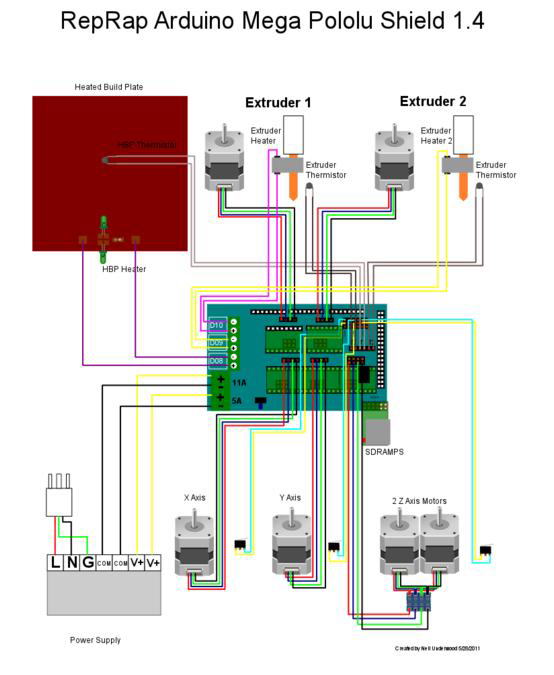 |
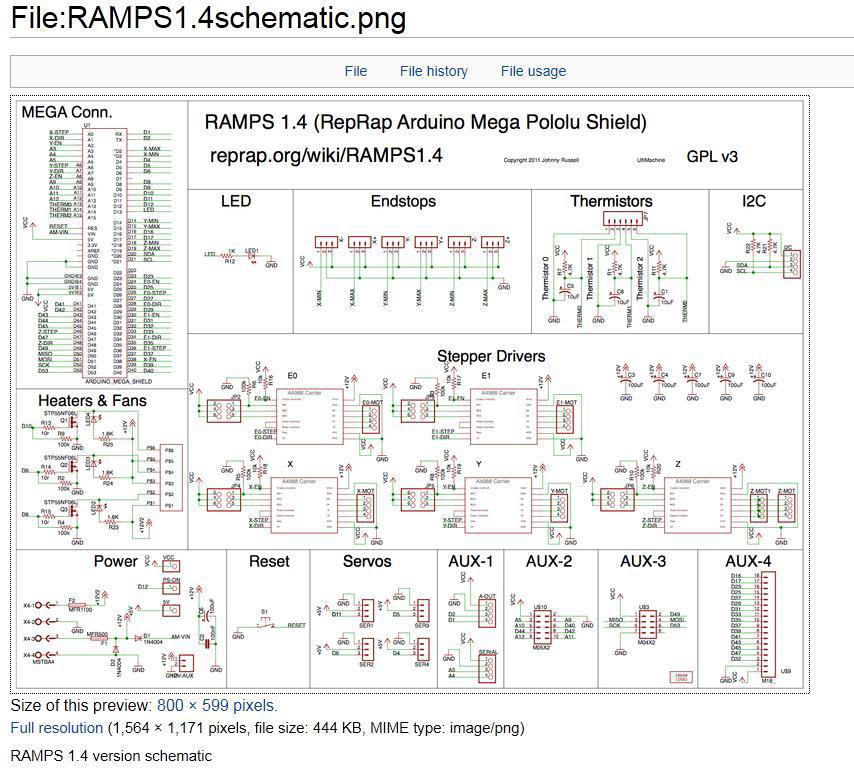
左はRAMPS1.4周辺の結線図です。 RAMPS1.4の詳細は下記をクリック http://reprap.org/wiki/File:RAMPS1.4schematic.png 下はRAMPS1.4の回路図です。 |
 |
|
 |
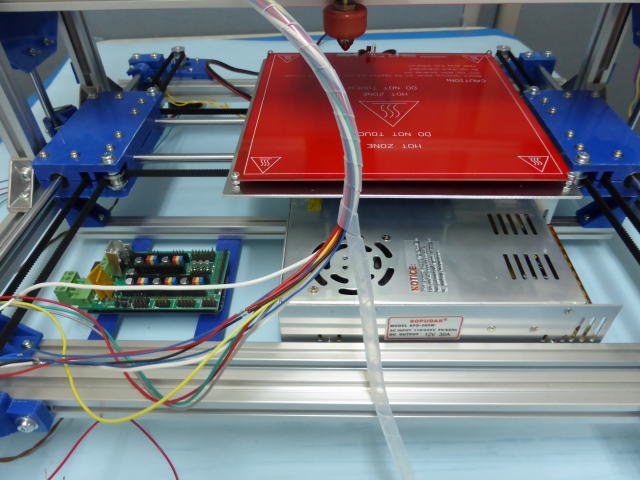
26 電源端子周りの配線 電源スイッチパネルにロッカースイッチを取り付けてください。 |
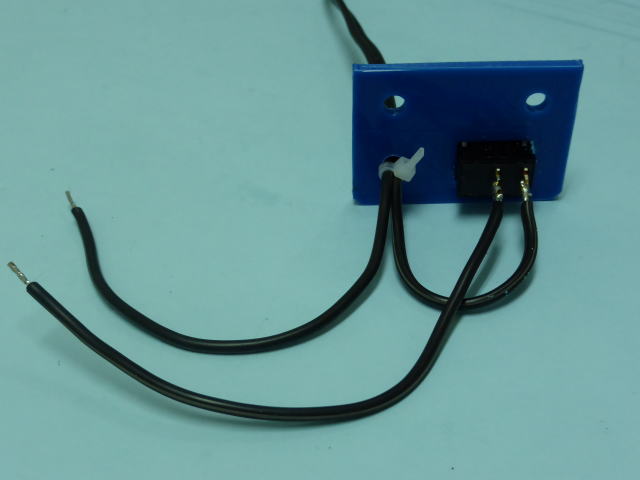 |
ACコードを加工してこのようにハンダ付けしてください。 |
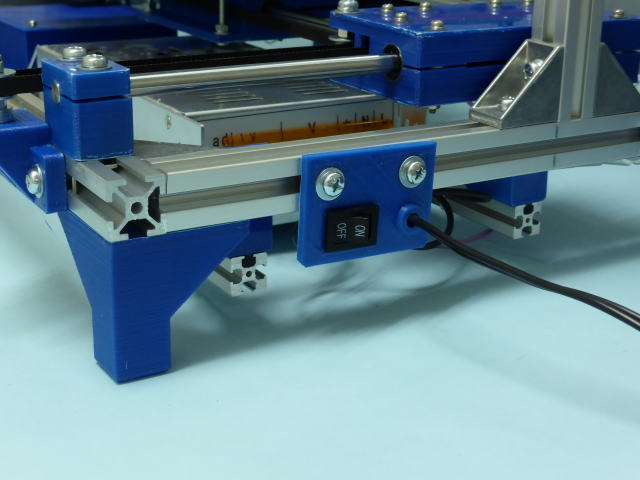 |
電源スイッチパネルは右側面に固定してください。 |
 |
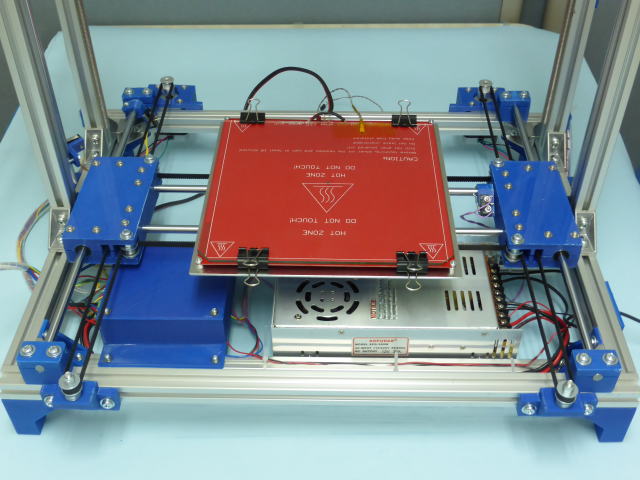
電源の端子部分はこのように接続してください。 一番上の2本はAC100Vの入力端子です。 その下の3つ目の端子はフレームグランド端子です。接続不要です。 次の3つは-V(GND)端子です。 黒線を接続してください。 黒の細い線はプリントヘッドのファンの線です。 最後の3つは+V(+12V)の端子です。 赤の線を接続してください。 赤の細い線はプリントヘッドのファンの線です。 電源線は+と-を間違えないよう注意してください。 間違えると壊れます。 +V・・・・赤の線 -V・・・・黒の線 |
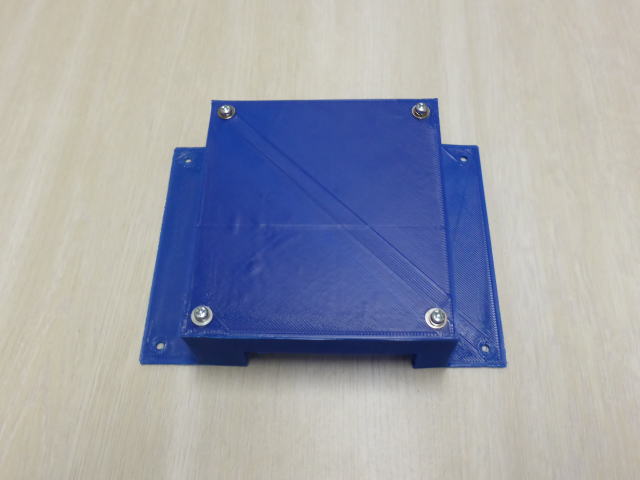 |
27 CPUカバーの取付 CPUカバーの枠に蓋を固定してください。 M3*8+W+SW+Nで固定 |
 |
制御基板の上にCPUカバーを被せて固定してください。 M3*8+W+SW+Nで固定 これで完成です。 |
{kind=link}