 |
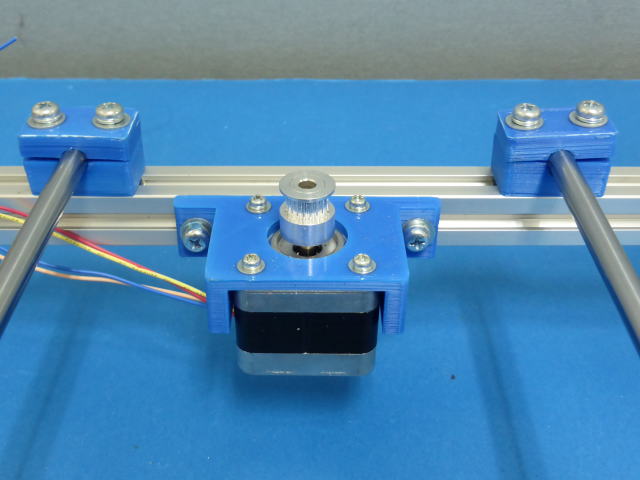
1 Y軸ステッピングモーターの取付 Y軸にはステッピングモーター17PM-K044-AKZに460mmの電線を延長した物を用います。 奥の横フレームにY軸用のステッビングモーター)を取り付けてください。 M3*10+W+SWで固定 軸にはタイミングプーリーを取り付けてください。 プーリーは後で高さ調整をしますので仮付けしておいてください。 |
 |
2 Y軸アイドラーの取付 手前の横フレームの内側にアイドラーを固定してください。 ネジ類は下記のように付けてください。 下からの並びを示しています。 1.M5*30ナベ小ネジ 2.M5スプリングワッシャー 3.M5ワッシャー中 4.アイドラーブラケット(印刷パーツ) 5.ナット 6.M5ワッシャー大 7.M5ワッシャー小 8.ベアリング 9.M5ワッシャー小 10.M5ワッシャー大 11.ナイロンナット |
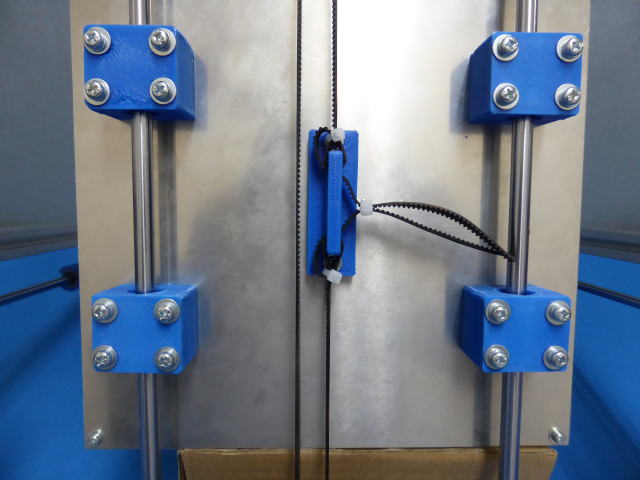 |
3 Y軸タイミングベルトの取付 Y軸用タイミングベルトを取り付けてください。 タイミングベルトは結束バンドで固定してください。 緩みが残らないように引っ張りながらバンドで固定してください。 ベルトクランプに固定したベルトが一直線になるようステッピングモーターとアイドラーの位置を微調整してください。 |
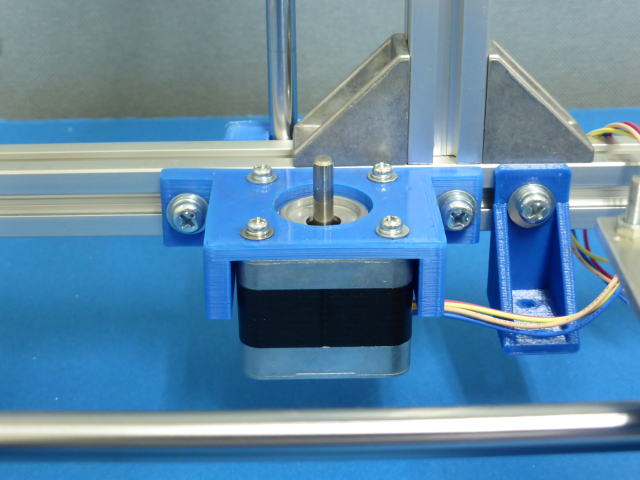 |
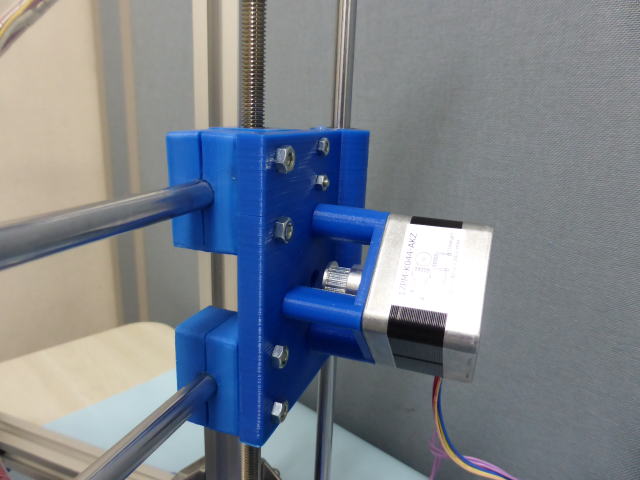
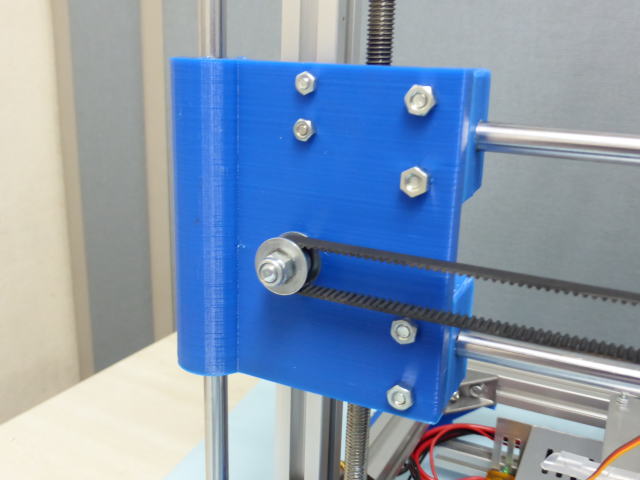
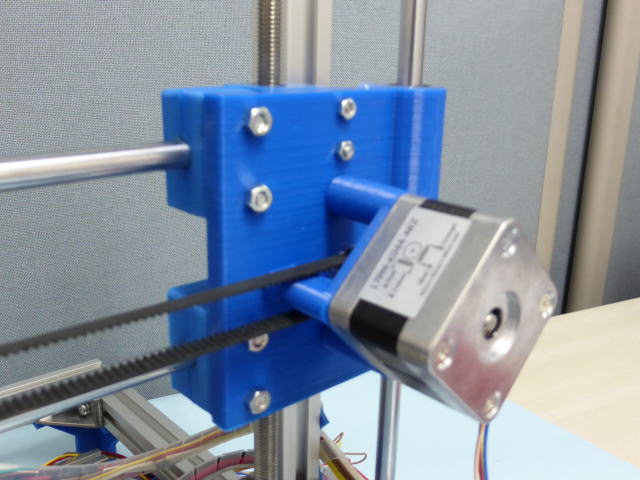
4-1 Z軸右側ステッピングモーターの取付 Z軸右側にはステッピングモーターSM-42BYG011の電線長さ550mmの物を用います。(写真は試作機です。モーター型番が違っていますので線の色は製品と同じではありません) Z軸のステッピングモーター右側を取り付けてください。 M3*10+W+SWで固定 |
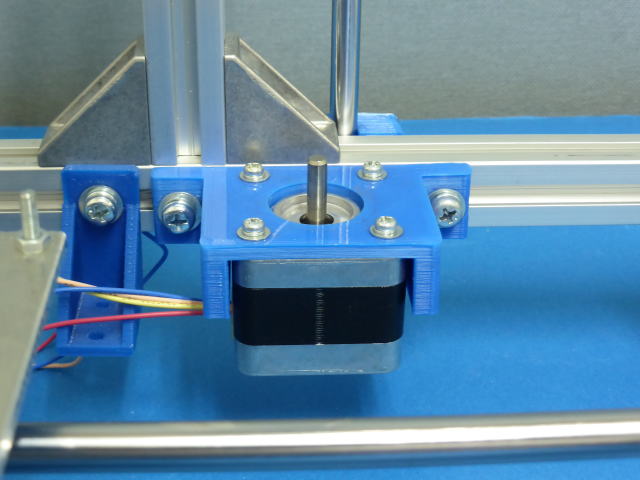 |
4-2 Z軸左側ステッピングモーターの取付 Z軸左側にはステッピングモーターSM-42BYG011の電線長さ220mmの物を用います。(写真は試作機です。モーター型番が違っていますので線の色は製品と同じではありません) Z軸のステッピングモーター左側を取り付けてください。 M3*10+W+SWで固定 |
 |
5 Z軸駆動ネジの取付 M8寸切りネジにカップリングとM8ステンレスナットを付けてください。 M4*25+W+SW+Nで固定(仮止め) M8ステンレスナットは丸みを帯びた方を上(カップリングが付いていない方)に向けてください。 2本作ってください。 |
 |
カップリングをZ軸の左側のステッピングモーターに付けてください。 |
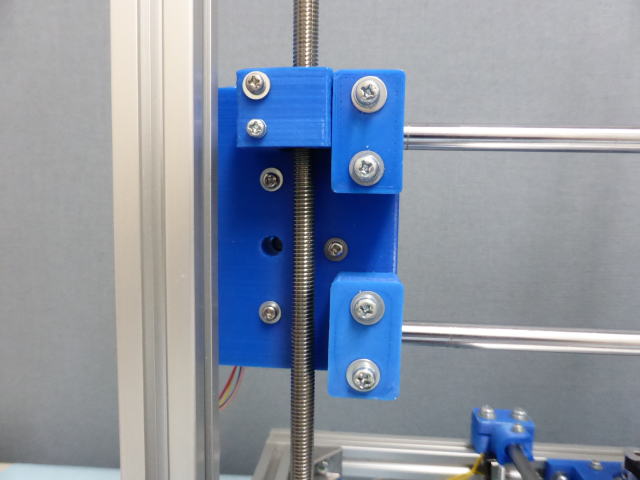 |
ナットホルダーの6角穴を下向きにしてM8寸切りボルトを通しZ軸左側キャリッジに固定してください。 M3*40+W+SW+NUTで固定 M8寸切りボルトとZ軸リニアシャフトが平行になるようZ軸ステッピングモーターの位置を微調整してください。 |
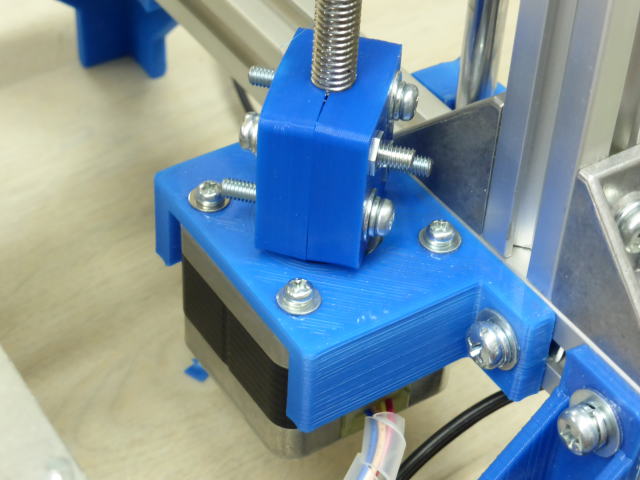 |
カップリングをZ軸の右側のステッピングモーターに付けてください。 |
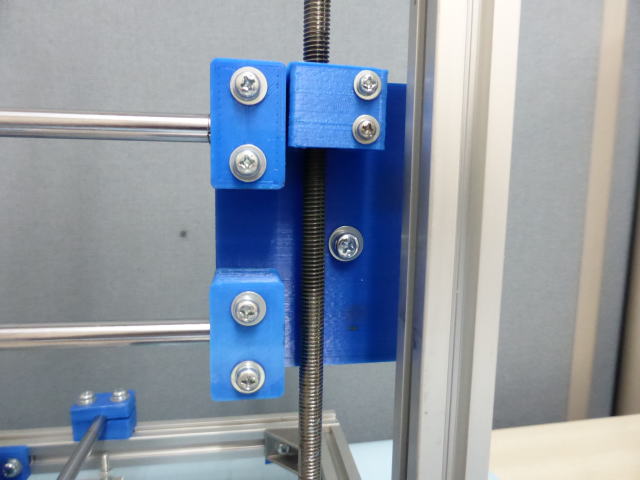 |
ナットホルダーの6角穴を下向きにしてM8寸切りボルトを通してZ軸右側キャリッジにを固定してください。 M3*40+W+SW+NUTで固定 M8寸切りボルトとZ軸リニアシャフトが平行になるようZ軸ステッピングモーターの位置を微調整してください。 |
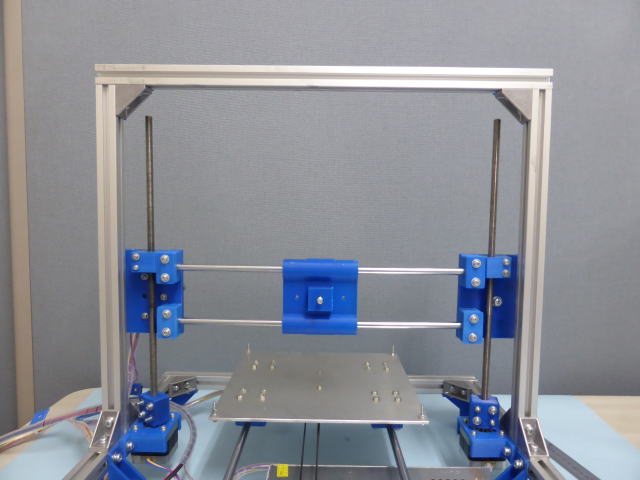 |
X軸が水平になるよう左右のナット位置を調整してください。 |
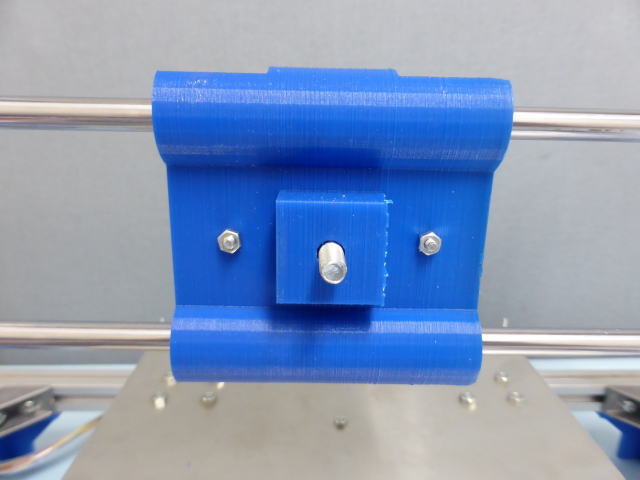 |
6 Xキャリッジ周辺の組立 M6x30のナベ小ネジにスプリングワッシャーとワッシャーを通してXキャリッジの中央の穴に後ろから通してください。 |
 |
Xキャリッジの背面にはX軸ベルトクランプを取り付けてください。 M3*15+W+SW+NUTで固定 |
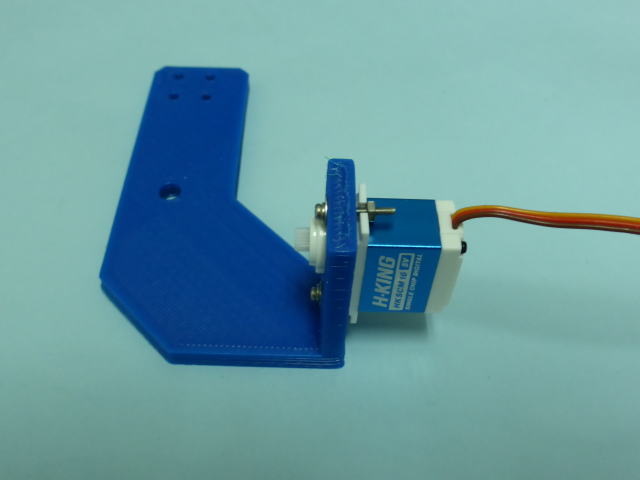 |
サーボブラケットにサーボモーターを取り付けてください。 M2*14+W+SW+NUTで固定 写真ではサーボモーターがHKSCM16-5になっています。 サーボモーターがHKSCM12-5の場合もあります。 サーボモーターがHKSCM12-5の場合は色がオレンジ色になります。(型番表示はありません。) |
 |
左はサーボモーター用のアームです。 赤丸で示す2箇所の穴の直径が2mmになるようドリルで広げてください。 |
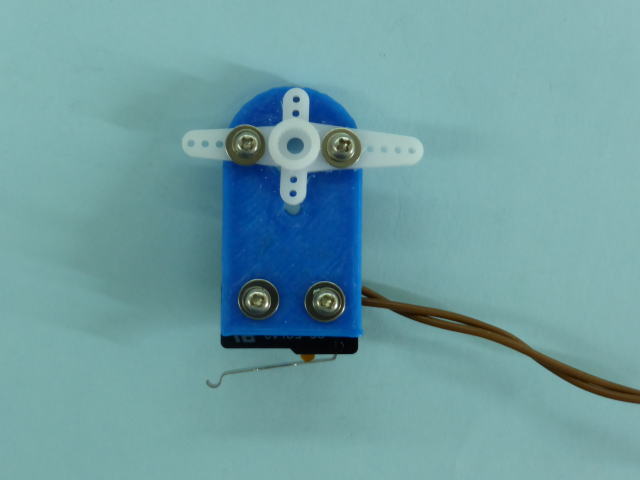 |
Z軸用マイクロスイッチブラケットにサーボモーターのアームを取り付けてください。 M2*8+W+SW+Nで固定 Z軸用マイクロスイッチブラケットにマイクロスイッチを取り付けてください。 M2*14+W+SW+Nで固定 |
 |
サーボモーターのアームがZ軸用マイクロスイッチブラケットより飛び出している部分は邪魔になるのでニッパーで切落としてください。 |
 |
サーボモーターのアームをサーボモーターの軸に取り付けてください。 サーボモーター付属ネジ(黒)で固定 |
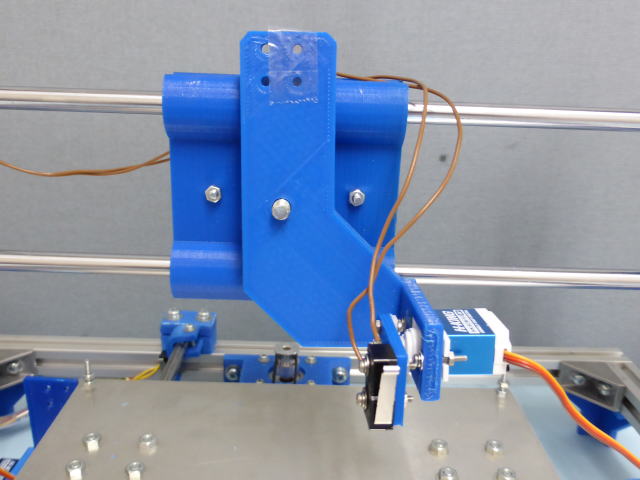 |
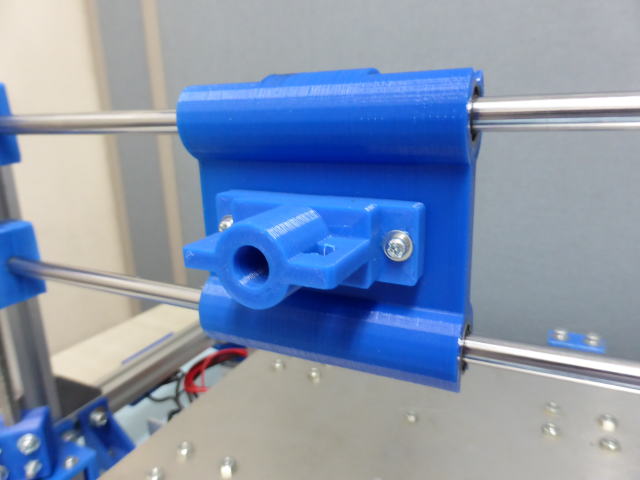
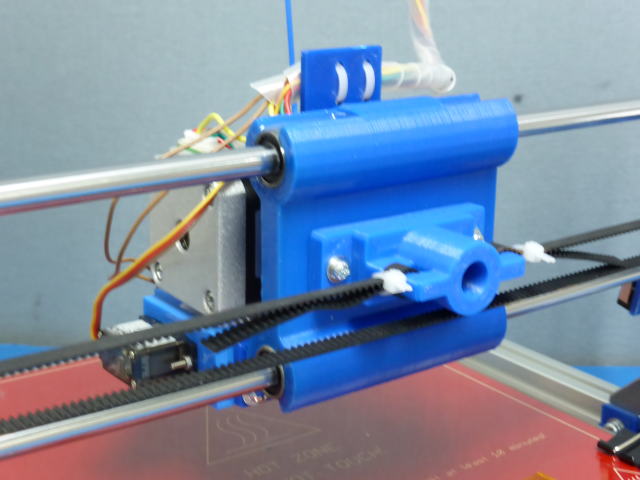
7 プリントヘッド取付 Xキャリッジの中央に通したネジにサーボモーターブラケットを引っかけてください。 傾かないよう上部をセロテープで固定してください。 |
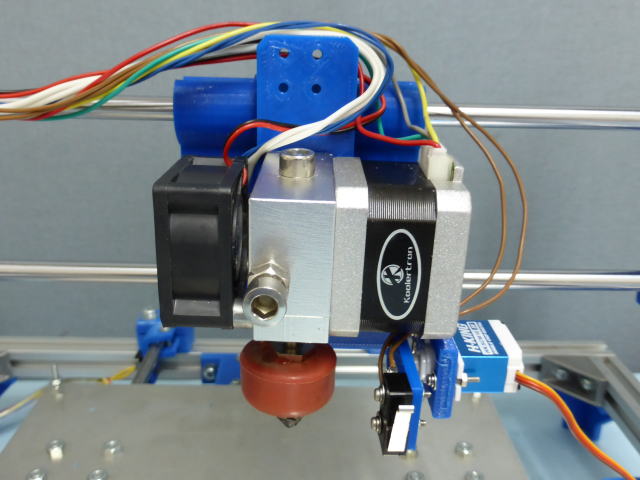 |
プリントヘッドを取り付けてください。 |
 |
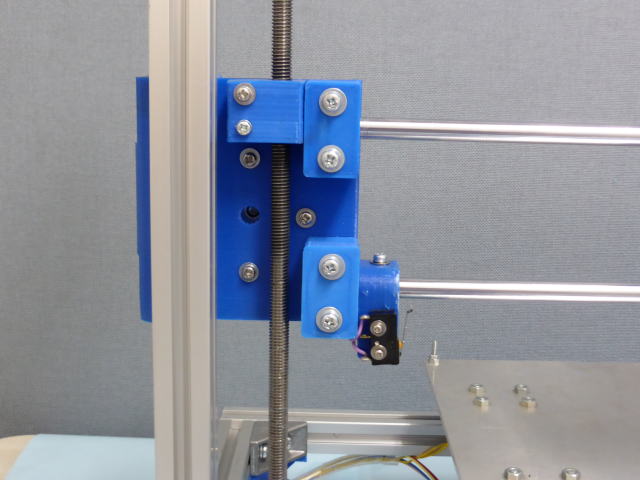
8 X軸ステッピングモーターの取付 X軸にはステッピングモーター17PM-K044-AKZに450mmの電線を延長した物を用います。 1.X軸用ステッピングモーターにタイミングプーリーを取り付けてください。 2.Z軸左側キャリッジのモーター固定用の穴(3箇所)にM3*40+W+SWを挿しこんでください。 3.Z軸左側キャリッジとX軸モーターの間に写真のようにX軸モータースペーサーを挟んでください。 4.M3*40のネジを締めてステッピングモーター固定してください。 M3*40+W+SWで固定(3箇所) |
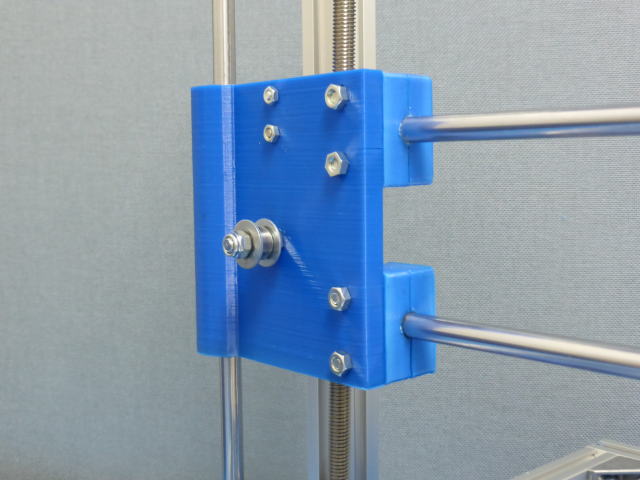 |
9 X軸タイミングベルトの取付 Z軸右側キャリッジにアイドラー用ベアリングを取り付けてください。 ネジ類は下記のように付けてください。 1.M5*30ナベ小ネジ 2.M5スプリングワッシャー 3.M5ワッシャー中 4.Z軸右側キャリッジ 5.ナット 6.M5ワッシャー大 7.M5ワッシャー小 8.ベアリング 9.M5ワッシャー小 10.M5ワッシャー大 11.ナイロンナット |
 |
タイミングベルトを張ってください。 |
 |
X軸モーター側のベルトは写真のように張ってください。 |
 |
X軸ベルトクランプにベルトを結束バンドで固定してください。 緩みが残らないように引っ張りながらバンドで固定してください。 |
 |
10 電源と制御基板の取付 電源に電源ブラケットを取り付けてください。 M4*10+W+SWで固定 |
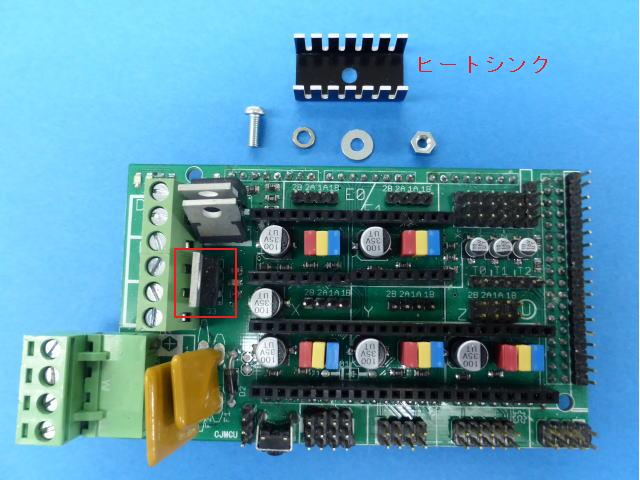 |
RAMPS 1.4インターフゥイス基板のヒートベッド用トランジスタ(赤枠)にヒートシンク(上)を取り付けます。 このヒートシンクは必ず取り付けてください。 付けないで動作させると過熱によりトランジスタが壊れます。 |
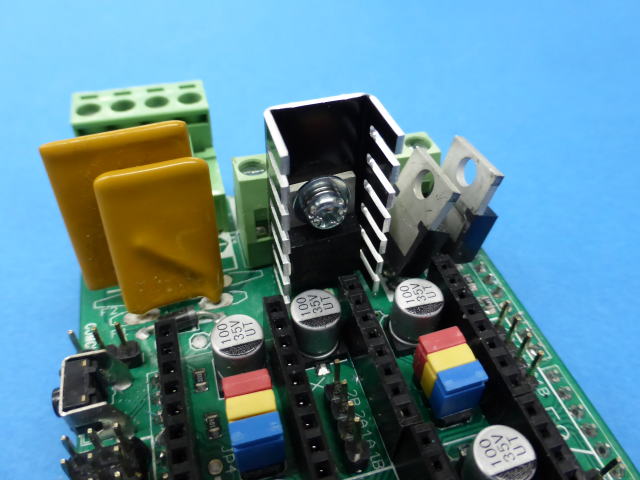 |
ヒートシンクをこのように取り付けてください。 トランジスタとヒートシンクの接触面に熱伝導グリス(添付品)を塗布してください。 右のトランジスタがヒートシンクと接触しないよう右側に曲げてください。 |
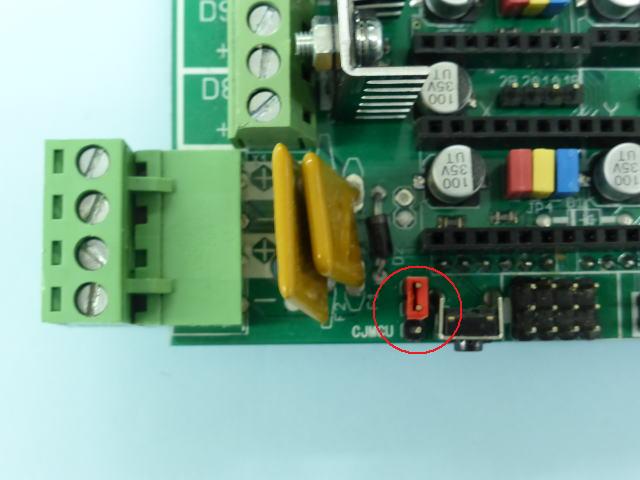 |
写真で示す位置にジャンパープラグを挿してください。 |
 |
CPUにCPUブラケットを取り付けてください。 M2*14+W+SW+Nで固定 |
 |
CPUにRAMPS1.4のインターフェイス基板を差し込んでください。 [お願い] RAMPS1.4インターフェイス基板はピンが曲がっている場合があります。 もし曲がっていましたらCPUに挿す前にラジオペンチなどで真っ直ぐに治してください。 |
 |
電源と制御基板を15mm角の長さ410mmのアルミフレーム2本に固定してください。 M3*8+W+Sw+Nで固定 |
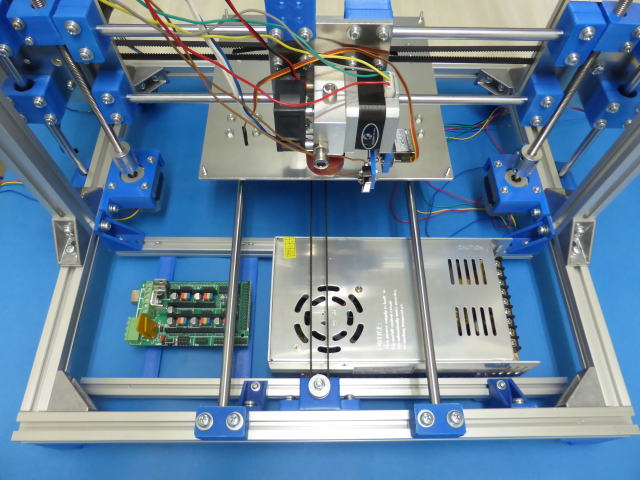 |
電源と制御基板を固定した15mm角アルミフレームを本体フレームに取り付けたフレームブラケットに固定してください。 M3*10+W+SW+NUTで固定 奥の2箇所はM3ネジを2個づつで固定 手前の2箇所はM3ネジを1個づつで固定 |
 |
11 X軸マイクロスイッチ取付 X軸用のマイクロスイッチを取り付けてください。 正面から見て下のシャフトの左端に付けてください。 マイクロスイッチをブラケットに固定 M2*14+W+SW+Nで固定 マイクロスイッチブラケットをシャフトに固定 M3*20+W+SW+Nで固定 |
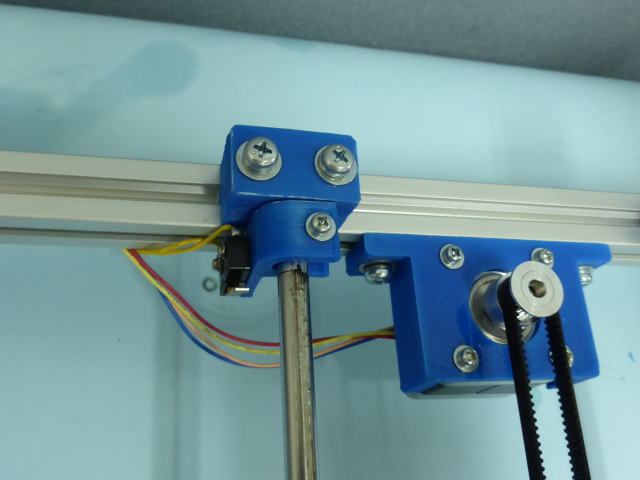 |
12 Y軸マイクロスイッチ取付 Y軸のマイクロスイッチを取り付けてください。 正面から見て左側のシャフトの後方位置に付けてください。 マイクロスイッチをブラケットに固定 M2*14+W+SW+Nで固定 マイクロスイッチブラケットをシャフトに固定 M3*20+W+SW+Nで固定 |
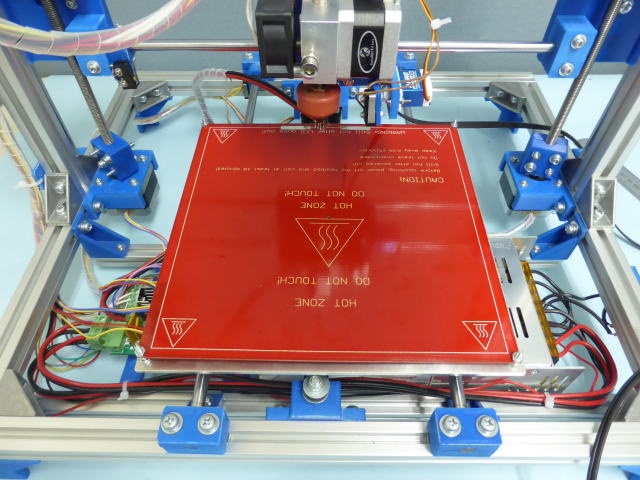 |
13 ヒートベッド取付 220×220×3mmのアルミ板にヒートベッドを固定してください。 |
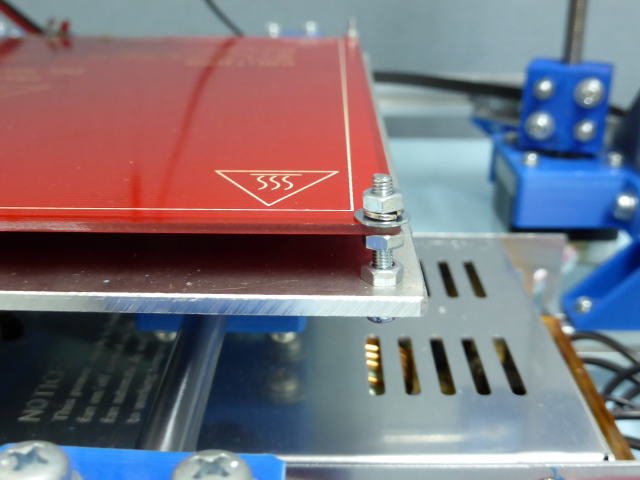 |
アルミ板には4角に既にM3*20+W+SW+NUTが付いています。 1.M3のナットをねじ込む ナットとナットの隙間は3mmにしてくだ゜さい。 2.その上にヒートベッドを置く 3.M3のWを入れる 4.M3のSWを入れる 5.M3のナットで固定する つまりヒートベッドは2個のナットで挟むようにしてアルミ板から7mm程度浮かせて固定する訳です。 |
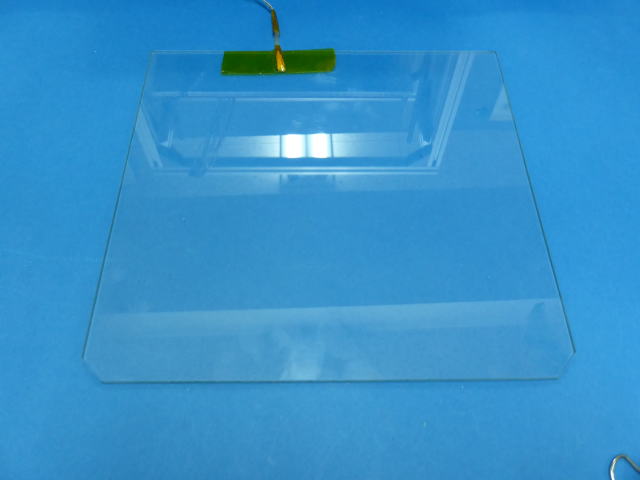 |
14 ガラス板取付 ヒートベッドの上に載せるガラス板に温度を計測するサーミスターを耐熱テープで張り付けてください。 サーミスターは印刷の邪魔にならない場所で適当な位置に張り付けてください。 印刷の邪魔になる場合はその都度張り付け位置を変えてください。 |
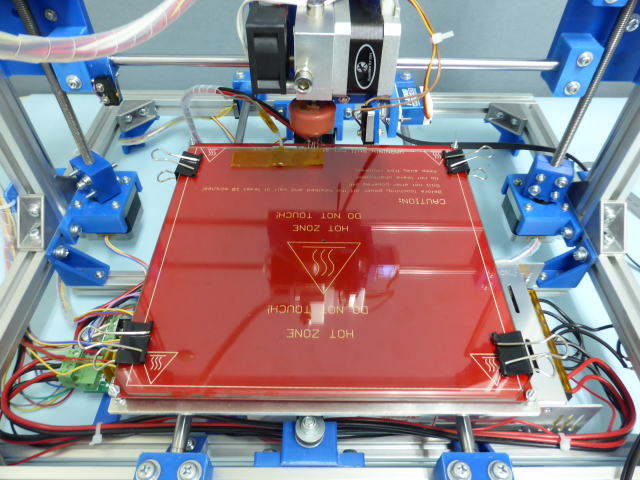 |
ヒートベッドの上にガラス板を載せてクリップで固定してください。 |